PWMOut
概要
PWM信号の生成と制御を行うC++クラス群を提供します。タイマーとDMAの制御に対応し、精密なPWMパルス幅・周波数の設定が可能です。
クラス概要
PWM
PWMクラスは、PWM信号の生成および各種制御処理を実現します。
NOTE
STM32のPWMは、以下のようなタイマーの仕組みを利用して生成されます:
- カウンタ(CNT) : 0から
ARR(Auto-Reload Register)までカウントアップする。 - ARR(オートリロードレジスタ) : PWMの周期(信号の繰り返し間隔)を決定する。
- CCR(キャプチャ・コンペアレジスタ) : PWMのON時間を決定する(デューティ比を設定)。
コンストラクタ
cpp
PWM(TIM_HandleTypeDef* htim, uint32_t channel, uint32_t TIMHz, bool useDMA = false, uint32_t ArrMax = 65536);- htim: TIMハンドル
- channel: PWMチャネル
- TIMHz: タイマーのクロック周波数
- useDMA: DMA制御を使用するか (初期値:false)
- ArrMax: タイマーARRの最大値 ARRの最大値は16bitの場合は65536、32bitの場合は4294967296
タイマーのクロック周波数
タイマーのクロック周波数は、MXの HCLK の設定を参照してください。 例えば、HCLKが160MHzの場合、TIMHzは 160e6を指定します。 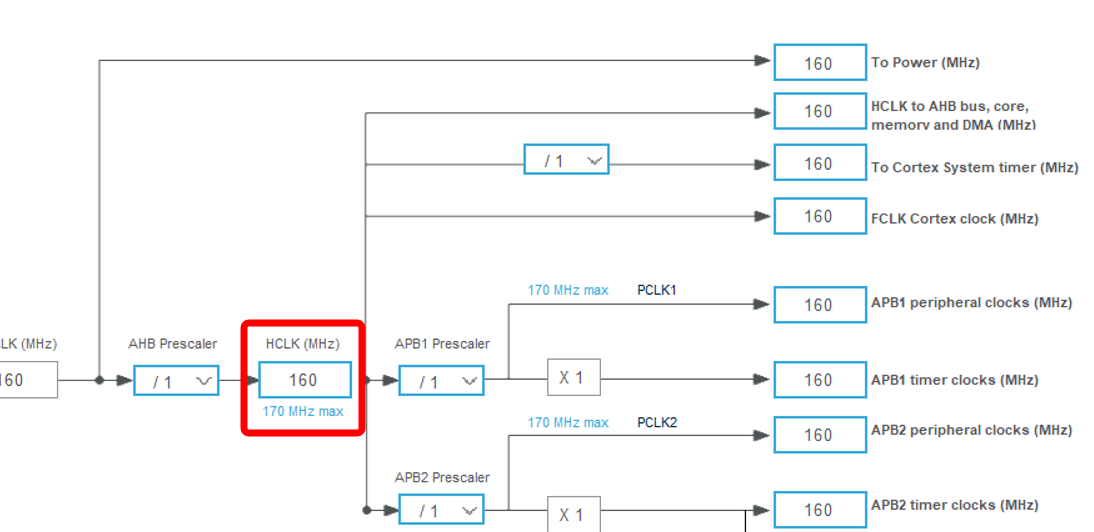
主なメソッド
void start()
PWM出力を開始
void stop()
PWM出力を停止
void setFrequency(uint32_t destFreq)
指定した周波数にタイマー設定を調整
destFreq: 目標周波数
void pulsewidth_us(uint32_t pulseWidth)
PWMパルス幅をマイクロ秒単位で指定
pulseWidth: パルス幅(マイクロ秒)
void pulsewidth_ms(uint32_t pulseWidth)
PWMパルス幅をミリ秒単位で指定
pulseWidth: パルス幅(ミリ秒)
float getDutyCycle() const
現在のデューティサイクルを返す
- デューティサイクル(0.0〜1.0)
void setDutyCycle(float duty)
指定したデューティサイクルに設定
duty: デューティサイクル(0.0〜1.0)
float getFrequency() const
実際に設定されている周波数を返す
- 周波数(Hz)
使用方法
CubeMXの設定
- Clock Source を
Internal Clockに設定。 - TIM1を展開し,Channel~ の設定を
PWM Generation CH~に設定。 (同時にピンが設定されます)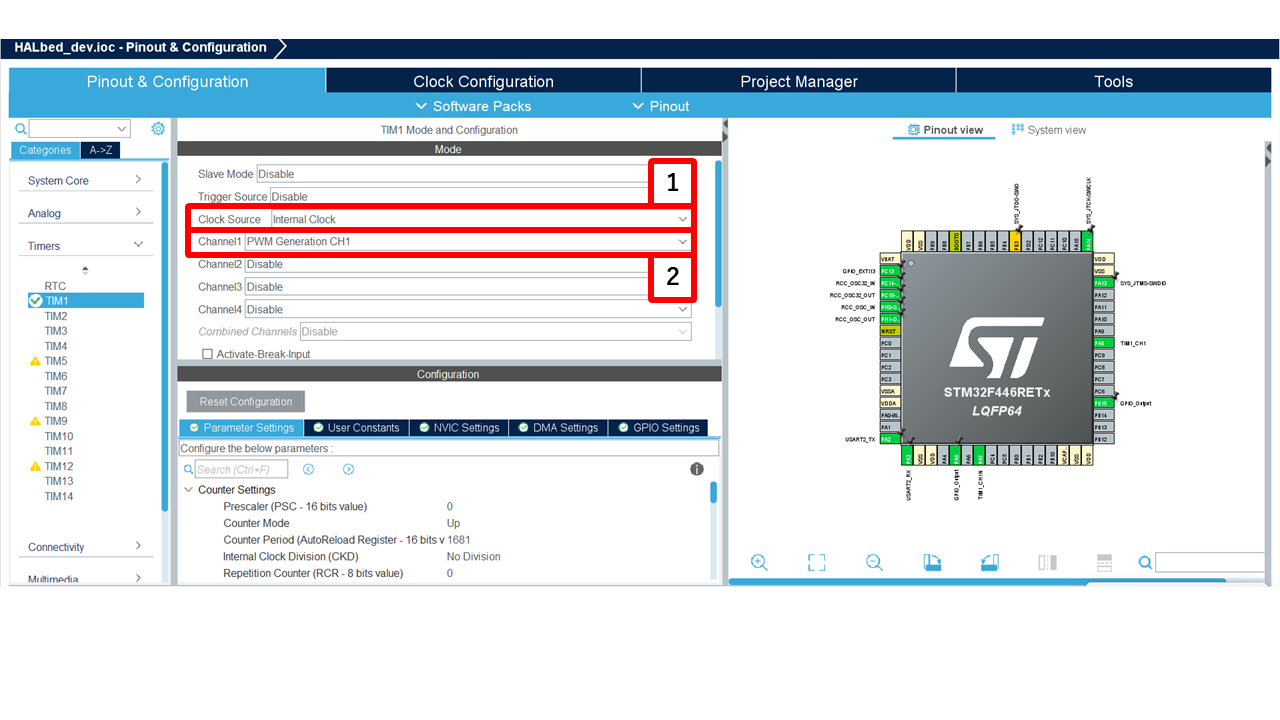
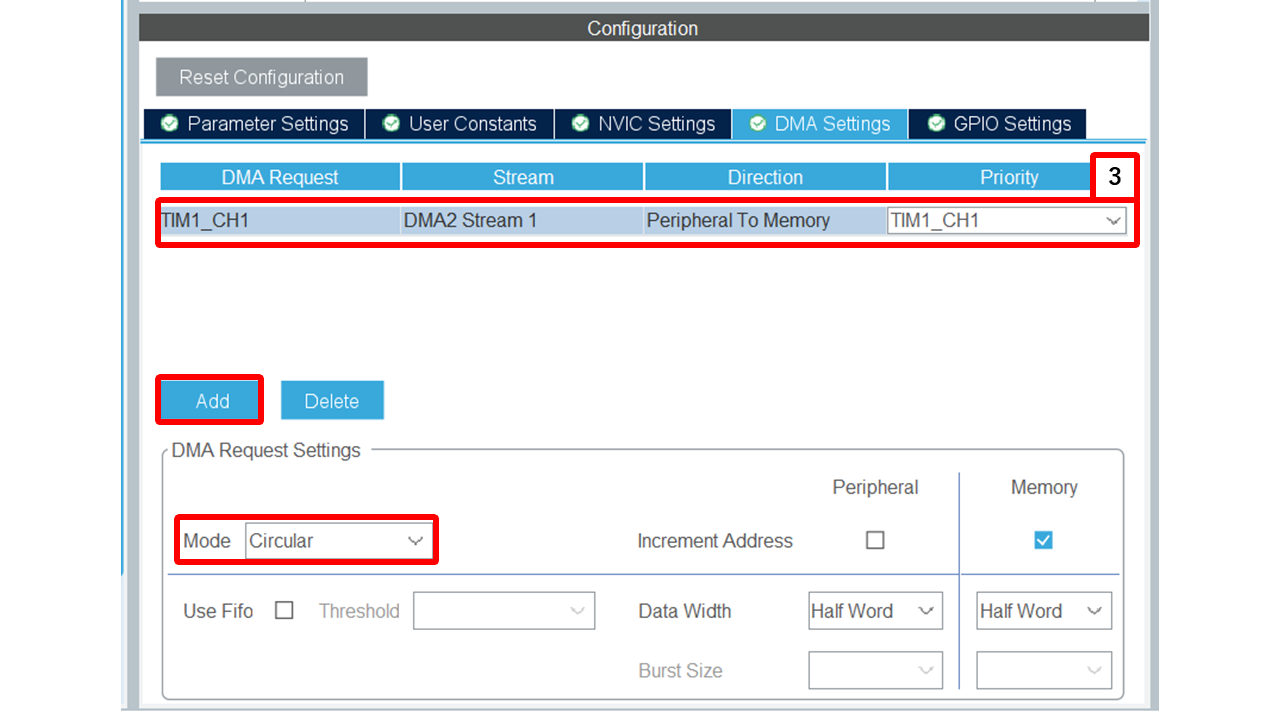
- DMAを使用するチャンネルで設定する (使用しない場合はスキップ)
app_main.cpp内
PWMクラスのインスタンスを生成します
cppPWM pwm(&htim1, TIM_CHANNEL_1, 84e6, true);必要な制御を実施します
cpppwm.start(); pwm.setFrequency(50000); pwm.pulsewidth_us(10);使用終了時、PWM出力を停止します
cpppwm.stop();
注意事項
- DMA使用時は、DMAの初期化など適切な設定が必要
- タイマー設定はシステム全体のクロックに依存するため、正確な値を確認すること
サンプルコード
Sample 1: 基本的なPWM制御の例
cpp
#include "main.h"
#include "../../Library/HALbed/Inc/HALbed.hpp"
using namespace HALbed;
extern TIM_HandleTypeDef htim2;
uint16_t HZ = 50e3; // 目標周波数
extern "C" void app_main() {
PWMOut pwm1(&htim2, TIM_CHANNEL_1, 160e6, false,4294967296);
PWMOut pwm2(&htim2, TIM_CHANNEL_2, 160e6, false,4294967296);
pwm1.start();
pwm2.start();
while (1) {
pwm1.setFrequency(HZ);
pwm2.setFrequency(HZ);
pwm1.pulsewidth_us(5);
pwm2.pulsewidth_us(15);
// 無限ループ
}
// pwm1.stop(); pwm2.stop();
}Sample 2: サーボモーターの制御例
cpp
#include "main.h"
#include "../../Library/HALbed/Inc/HALbed.hpp"
using namespace HALbed;
extern TIM_HandleTypeDef htim2;
PWM pwm(&htim2, TIM_CHANNEL_1, 84e6, true);
int servoAngleToPulseWidth(float angle) {
// 最小パルス 700us, 最大パルス 2300us として、角度をパルス幅に変換
return static_cast<uint32_t>(700 + (angle / 180.0f) * (2300 - 700));
}
extern "C" void app_main() {
pwm.start();
float angle = 0.0f;
while (1) {
uint32_t pulseWidth = servoAngleToPulseWidth(angle);
pwm.pulsewidth_us(pulseWidth);
HAL_Delay(1000); // 1秒待機
angle += 30.0f; // 30度ずつ回転
if (angle > 180.0f) {
angle = 0.0f; // 角度をリセット
}
}
}sample 3 : RGB LEDテープを光らせる
cpp
#include "main.h"
#include "../../Library/HALbed/Inc/UART.hpp"
#include "../../Library/HALbed/Inc/PWMOut.hpp"
#include <math.h> // For sin() function
using namespace HALbed;
extern UART_HandleTypeDef huart2;
UART pc(&huart2);
extern TIM_HandleTypeDef htim3;
float LED_duty[3] = {0.5f, 0.5f, 0.5f};
PWMOut R(&htim3,TIM_CHANNEL_1,72000000,false);
PWMOut G(&htim3,TIM_CHANNEL_2,72000000,false);
PWMOut B(&htim3,TIM_CHANNEL_3,72000000,false);
PWMOut LED[3] = {R, G, B};
extern "C" void app_main(void) {
pc.xprintf("main start!\r\n");
for(int i = 0; i < 3; i++) {
LED[i].start(); // PWM出力を開始
LED[i].setFrequency(1000);
LED[i].setDutyCycle(LED_duty[i]); // 初期デューティサイクルを設定
}
float angle = 0.0f;
const float step = 0.05f; // より滑らかな遷移のための小さなステップ
const float PI = 3.14159265359f; // π定数
const float phaseShift = PI / 3; // 60度(ラジアン)
while (1) {
// LEDの色を変化させるための正弦波を生成
LED_duty[0] = (sin(angle) + 1.0f) / 2.0f; // R: 0°位相
LED_duty[1] = (sin(angle + phaseShift) + 1.0f) / 2.0f; // G: 60°位相
LED_duty[2] = (sin(angle + 2 * phaseShift) + 1.0f) / 2.0f; // B: 120°位相
// すべてのLEDを更新
for (int i = 0; i < 3; i++) {
LED[i].setDutyCycle(LED_duty[i]);
pc.xprintf("LED %d duty: %f\r\n", i, LED_duty[i]);
}
angle += step;
if (angle >= 2 * PI) {
angle -= 2 * PI;
}
HAL_Delay(10);
}
}